PROYECTO MYO
Desarrollo de Prótesis Mioeléctrica en Código Abierto
El proyecto MYO, cuyo objetivo es el diseño y fabricación de una prótesis mioeléctrica, fue el punto de partida de Autofabricantes en Octubre de 2015 y alrededor del cual creó el grupo de trabajo y su comunidad. Desde entonces, todos los componentes del colectivo han aportado sus conocimientos para colaborar en todos los campos del proyecto. La complejidad, la diversificación en otras líneas de trabajo y la naturaleza del proyecto han llevado al proyecto por un gran número de fases y líneas de desarrollo divergentes que pretendemos culminen en un primer prototipo funcional a finales del 2019 o principios de 2020.
Una prótesis mioeléctrica consta de una variedad de elementos tales como sensores mioeléctricos (que son capaces de medir, a través de la piel, la tensión muscular de una zona), electrónica de control (que maneja los distintos actuadores y conecta con los sensores) y un software (capaz de transformar las contracciones recogidas por el sensor en decisiones y actuaciones concretas).
Todas los distintos elementos han sido desarrollados y evolucionados a partir de la propia experiencia de los miembros del equipo y la guia y diseño de especificaciones a través del contacto con las familias, priorizando las necesidades concretas del usuario final.
Todas las tecnologías empleadas son Open Source, siendo el principal objetivo del proyecto que este pueda ser fabricado, desarrollado y evolucionado de forma libre por colaboradores inicialmente ajenos al grupo.
Sensores myo
Quizás una de las partes más complejas del proyecto es la elección, manipulación y calibrado de los sensores mioeléctricos. En este campo se han probado distintas soluciones asequibles.
Una dificultad añadida es el que el usuario final de la prótesis (un niño o niña) no tiene desarrollada una musculatura potente que sea fácilmente captable por estos sensores.
En este proyecto, hemos probado todo tipo de sensores mioeléctricos basados en adhesivos, que se descartaron por su falta de estabilidad. En 2018, se decidió implementar el Brazalete Myo Control de la empresa canadiense Myo, que por su morfología basada en un brazalete, proporcionaba una la fiabilidad que buscábamos.bEste producto se comunica con nuestro sistemas a través de librerías adaptadas.
Micromotores
Otra de las partes más importante de una prótesis mioeléctrica son los micromotores. Estos son los encargados de hacer que los dedos de la prótesis se abran o cierren según los impulsos captados por los sensores. En un principio, pensamos en utilizar 3 motores: 1 Para el dedo pulgar, 1 Para el dedo índice y 1 Para los otros tres dedos
El problema añadido que tenemos es el poco espacio del que disponemos, pues nuestro proyecto de prótesis mioeléctrica infantil a partir de los cinco años, es que tengan muñón. Por tanto, gran parte del interior de la palma estará ocupada por el muñón.
Al igual que ocurrió con los sensores, probamos muchos tipos de motores: más grandes ó más pequeños. Con los primeros teníamos problemas de espacio, y con los segundos, los que encontramos no superaron la prueba de esfuerzo. Al final, elegimos unos micromotores estandar con reductora incorporada que superaron con creces la prueba de esfuerzo y con un coste de 14 € cada uno.
Placa de Control Electrónico
El desarrollo de la placa de control principal ha estado definido por el microprocesador elegido y las distintas fases que ha sufrido:
- Arduino: La primera aproximación fue con Arduino, debido a lo extendido de su uso, su bajo precio y su fácil manejo. Conforme se destapó la complejidad del proyecto se descartó esta opción.
A partir de este punto surgen dos líneas paralelas:
- Raspberry Pi Zero: Con el objetivo de aumentar la capacidad de procesamiento y dotar al sistema de conectividad Bluetooth, se optó por este procesador potente con capacidad para gestionar y almacenar un gran número de periféricos.
- ESP32: Con el objetivo de mantener un bajo consumo y dotar al sistema de conectividad Wifi y Bluetooth se optó por probar con este micro más sencillo pero con un precio y tamaño más reducido.
Actualmente ambas líneas están en desarrollo.
Diseño
En Autofabricantes, cada uno de los proyectos en que estamos investigando tienen un usuario final concreto. No solemos desarrollar proyectos genéricos, todos están personalizados. Por ello, para la prótesis mioeléctrica la diseñamos pensando en Pablo, un niño de 5 años que nació con agenersia en su mano derecha.
Lo primero que hicimos fue escanear su muñón y la mano sana para saber el tamaño real que debería tener la palma de la prótesis. Una vez realizado el escaneado, preocedimos a diseñar el interior de la palma con el hueco para su muñón y los 3 micromotores. Este proceso ha sido largo y muy complicado, habremos diseñado e impreso en 3D unas 15 versiones diferentes. La elección de los motores que han pasado el test de esfuerzzo y que tengan un precio asequible, han influído notablemente en el diseño del interior de la palma. Por ello, para niñas que tengan muñón sólo podremos usar dos motores (uno para el pulgar y el otro para el resto de los dedos), y si no tuviese muñón, entonces podríamos volver a la idea original de los tres motores.
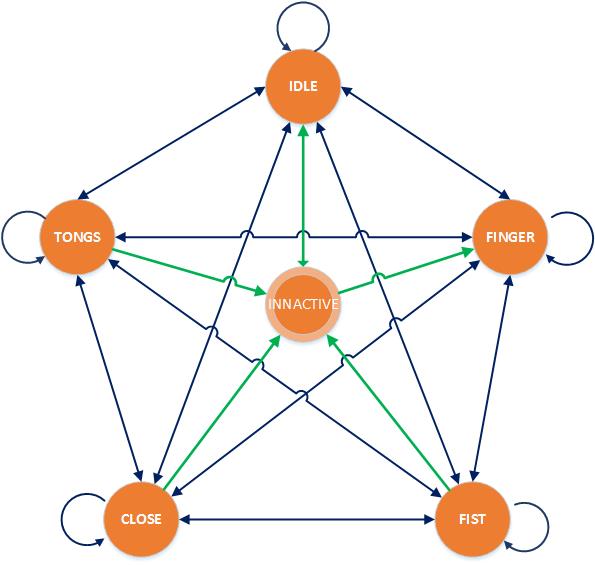
¿Cómo funciona una máquina de estados?
En la parte software, definiéndola como un sistema de entrada salida, la entrada sería la detección de intención de movimiento del niño o niña a través del sensor myo. La salida, el conjunto de órdenes de control que se transmitirán a la placa para que se de el movimiento en la mano.
Esto se consigue gracias a una máquina de estados, donde cada uno de éstos se corresponden con una posición de la mano, que será: reposo, pinza, señalar, ok y cerrado.
La detección de intención de movimiento con el sensor myo, será la que posibilitará la transición de un estado a otro. Todos los estados se pueden alcanzar desde cualquier otro, pero existe un estado de seguridad para evitar movimientos involuntarios de la mano.
A destacar, la complejidad que existe en la detección de la intención de movimiento de la niña para que se lleve a cabo la transición. La poca musculatura del niño, la necesidad de encontrar la forma más adecuada de comunicarle al sensor qué movimiento desea realizar la niña de forma unívoca evitando por ejemplo que movimientos habituales del niño se interpreten por el sensor como un trigger, etc.
Ahora estamos en la fase de implementación inicial, donde estamos controlando las transiciones de cerrado de pinza basándonos en un sólo movimiento de presión en el brazo (como si en nuestro caso estuviésemos cerrando un puño).
En cuanto a la implementación, se ha empleado la orientación a objetos con el lenguaje de programación Python. Se ha realizado un diseño orientado a la reutilización, de tal manera, que la implementación se pueda cambiar con facilidad según las necesidades de cada niña.