PROYECTO MYO
Desarrollo de Prótesis Mioeléctrica en Código Abierto
Es el proyecto por el que creamos Autofabricantes en Octubre de 2015. Desde entonces, en estos cuatro años hemos participado todos los componentes del colectivo tanto en desarrollo como en diseño. La complejidad del proyecto ha hecho que se alargue un poco más del tiempo estimado, pero a finales del 2019 o principios de 2020 tendremos el primer prototipo para poder empezar a probarlo y testear posbles cambios o corregir errores.
Una prótesis mioeléctrica está formada por varios elementos: sensores myo, hardware y software diseñados exproceso y unos micromotores.
Los sensores myo, colocados estratégicamente en el antebrazo o brazo del niño o niña, captan unos impulsos nerviosos que traslada a una placa electrónica, y mediante un software los transforma en corriente eléctrica. Esta corriente, es la encargada de alimentar unos pequeños motores que hacen qeu los dedos de la prótesis se abran o se cierren según necesitemos.
En el desarrollo de esta prótesis hemos tenido de diseñar y desarrollar varios tipos de electrónica, la que controla individualmente cada uno de los motores, como la que actúa como cerebro central. Además, hemos tenido que crear una programación que al recibir los impulsos nerviosos captados por los sensores lo traduzca en una orden determinada para que los micromotores actúen de una manera u otra. Es lo que se llama una máquina de estados.
Sensores myo
Una de las partes fundamentales de una prótesis mioeléctrica son los sensores myo. Estos son los encargados de captar los impulsos nerviosos del brazo o antebrazo y trasladarlos a la electrónica para transformarlos en corriente eléctrica y así poder mover los motores.
En este proyecto, hemos probado todo tipo de sensores myo y no siempre funcionaban bien, dándosnos error con cierta frecuencia. Fue en 2018, cuando descubrimos el «Brazalete Myo Control» de la empresa canadiense Myo, que con 8 sensores podría ser una buena solución.
Al ser de código libre, pudimos sustituir el software de serie por uno diselado por nosotros que cubra nuestras necesidades.
Micromotores
Otra de las partes más importante de una prótesis mioeléctrica son los micromotores. Estos son los encargados de hacer que los dedos de la prótesis se abran o cierren según los impulsos captados por los sensores. En un principio, pensamos en utilizar 3 motores: 1 Para el dedo pulgar, 1 Para el dedo índice y 1 Para los otros tres dedos
El problema añadido que tenemos es el poco espacio del que disponemos, pues nuestro proyecto de prótesis mioeléctrica infantil a partir de los cinco años, es que tengan muñón. Por tanto, gran parte del interior de la palma estará ocupada por el muñón.
Al igual que ocurrió con los sensores, probamos muchos tipos de motores: más grandes ó más pequeños. Con los primeros teníamos problemas de espacio, y con los segundos, los que encontramos no superaron la prueba de esfuerzo. Al final, elegimos unos micromotores estandar con reductora incorporada que superaron con creces la prueba de esfuerzo y con un coste de 14 € cada uno.
Electrónica
En este proyecto de la prótesis mioeléctrica hemos diseñado dos tipos de placas electrónicas. Una pequeña placa para controlar cada uno de los micromotores que va montada sobre el propio cuerpo del motor, formando un grupo compacto. De esta manera se ahorra espacio.
La otra placa, después de tres versiones se ha reducido considerablemente el tamaño. Será el cerebro de la prótesis, en ella se conectarán los motores, la conexión bluetooth para los sensores, el cargador de batería, etc.
Diseño
En Autofabricantes, cada uno de los proyectos en que estamos investigando tienen un usuario final concreto. No solemos desarrollar proyectos genéricos, todos están personalizados. Por ello, para la prótesis mioeléctrica la diseñamos pensando en Pablo, un niño de 5 años que nació con agenersia en su mano derecha.
Lo primero que hicimos fue escanear su muñón y la mano sana para saber el tamaño real que debería tener la palma de la prótesis. Una vez realizado el escaneado, preocedimos a diseñar el interior de la palma con el hueco para su muñón y los 3 micromotores. Este proceso ha sido largo y muy complicado, habremos diseñado e impreso en 3D unas 15 versiones diferentes. La elección de los motores que han pasado el test de esfuerzzo y que tengan un precio asequible, han influído notablemente en el diseño del interior de la palma. Por ello, para niñas que tengan muñón sólo podremos usar dos motores (uno para el pulgar y el otro para el resto de los dedos), y si no tuviese muñón, entonces podríamos volver a la idea original de los tres motores.
¿Cómo funciona una máquina de estados?
En la parte software, definiéndola como un sistema de entrada salida, la entrada sería la detección de intención de movimiento del niño o niña a través del sensor myo. La salida, el conjunto de órdenes de control que se transmitirán a la placa para que se de el movimiento en la mano.
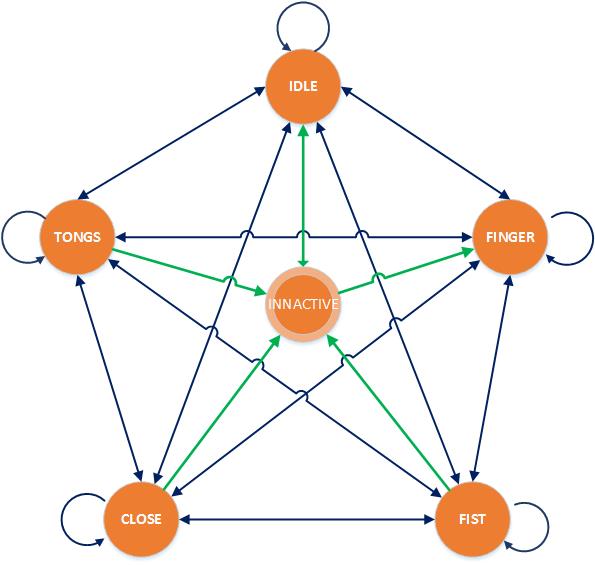
Esto se consigue gracias a una máquina de estados, donde cada uno de éstos se corresponden con una posición de la mano, que será: reposo, pinza, señalar, ok y cerrado.
La detección de intención de movimiento con el sensor myo, será la que posibilitará la transición de un estado a otro. Todos los estados se pueden alcanzar desde cualquier otro, pero existe un estado de seguridad para evitar movimientos involuntarios de la mano.
A destacar, la complejidad que existe en la detección de la intención de movimiento de la niña para que se lleve a cabo la transición. La poca musculatura del niño, la necesidad de encontrar la forma más adecuada de comunicarle al sensor qué movimiento desea realizar la niña de forma unívoca evitando por ejemplo que movimientos habituales del niño se interpreten por el sensor como un trigger, etc.
Ahora estamos en la fase de implementación inicial, donde estamos controlando las transiciones de cerrado de pinza basándonos en un sólo movimiento de presión en el brazo (como si en nuestro caso estuviésemos cerrando un puño).
En cuanto a la implementación, se ha empleado la orientación a objetos con el lenguaje de programación Python. Se ha realizado un diseño orientado a la reutilización, de tal manera, que la implementación se pueda cambiar con facilidad según las necesidades de cada niña.
Deja tu comentario